Publications
I graduated from Carnegie Mellon University in 2011 with Bachelor and Master degrees in Computer Science. My academic interests include Computer Graphics, Animation, Game Programming and Robotics. The following are some projects I have worked on under the guidance of my advisor, Nancy Pollard.
Sticky Finger Manipulation of Virtual Cloth
Prior to my Master work, I experimented with the direct manipulation of virtual cloth via “sticky fingers”, a multi-touch interaction technique that was coined to describe the direct positional control of multiple entities (cloth particles in this case).
The videos below demonstrate how the resulting multi-touch interface could be used to intuitively pinch, drape and tear up some virtual cloth:
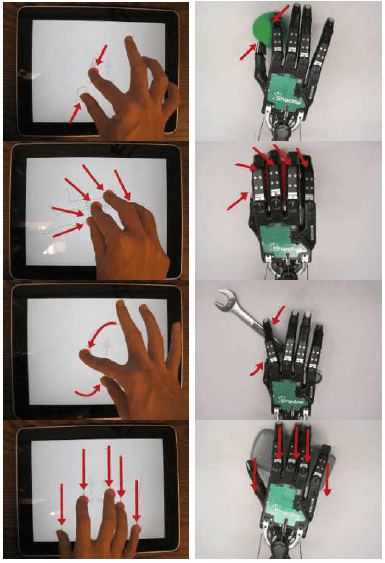
Dexterous Telemanipulation With a Multi-Touch Interface
Ken Toh · Shan Huang · Joy Lin · Maria Bajzek · Garth Zeglin · Nancy S. Pollard
In my Master year, we extended the concept of “sticky finger control” to robotic teleoperation.
By mapping the trajectories of a user’s fingertips directly to those of a robot hand, one would be able to intuitively manipulate the hand to achieve highly dexterous motions such as grasping, dragging, reorienting, rolling, and smoothing.
Our paper was presented (opens in a new tab) at the 2012 12th IEEE-RAS International Conference on Humanoid Robots, Osaka.
Please see the following links for more information:
- Official Project Page
- Short Video | Long Video
- Bonus Video (Simulated Teleoperation)